-


-


-



WhatsApp


В чем разница между сервоприводом и контроллером движения?
2025-09-19
В мире автоматизации существует тонкая грань между тем, что считается контроллером движения, и тем, что представляет собой простой сервопривод. Крайне важно понимать функциональность и интеллектуальные возможности каждого устройства, поскольку во многих приложениях для завершения работы системы требуется как контроллер движения, так и сервопривод.
Сервосистема
Серводвигатель питается от сервопривода, который подаёт напряжение и ток на обмотки двигателя, а затем отслеживает обратную связь для замыкания сервоконтура. В большинстве случаев сервопривод состоит из трёх встроенных сервоконтуров: контура тока (или крутящего момента), контура скорости и контура положения, которые взаимодействуют друг с другом для обеспечения точного движения. Необходимые контуры определяются ожидаемым режимом работы двигателя.
- В системах управления крутящим моментом, требующих определённого крутящего момента, достаточно только токового контура. Поскольку крутящий момент прямо пропорционален току, он регулируется датчиком, который обеспечивает обратную связь по току для сервопривода.
- В системах управления скоростью часто встречаются как контуры тока, так и контуры скорости. Контур скорости отслеживает показания датчика, который передает информацию о скорости сервоприводу, а затем использует эти данные для регулировки контура тока, увеличивая или уменьшая крутящий момент.
- Наконец, приложение позиционного контура использует датчик обратной связи, соединенный с двигателем, который отправляет информацию о положении на сервопривод или контроллер движения, который, в свою очередь, подает сигнал контуру скорости об увеличении или уменьшении скорости, который затем передает информацию в токовый контур для регулирования крутящего момента.
Определение ролей привода и контроллера
В системе управления крутящим моментом бесщёточного серводвигателя постоянного тока «устройство» подаёт ток и напряжение на двигатель, используя управляющий входной сигнал, измеряемый по току обратной связи. Устройство, обеспечивающее питание двигателя, называется сервоусилителем или сервоприводом. Токовый или моментный привод бесполезен, если он не получает конкретную команду, указывающую ему необходимый крутящий момент. Команда может поступать от различных источников, которые, по сути, выполняют функции «контроллера». Эта команда может быть простой, например, когда человек, выполняющий функции контроллера, вручную регулирует потенциометр для подачи на привод сигнала +/- 10 В постоянного тока в зависимости от желаемого выходного крутящего момента.
В типичной бесщёточной сервосистеме постоянного тока присутствуют три встроенных контура с различными элементами компенсации и фильтрации. Внутренний контур (токовой контур) управляется контуром скорости, который, в свою очередь, управляется контуром положения. Контур тока всегда находится в приводе, в то время как контуры скорости и положения находятся либо в приводе, либо в контроллере. Контур тока использует датчик тока двигателя для измерения тока в обмотках двигателя, в то время как контур скорости использует датчик скорости (обычно энкодер) для измерения скорости двигателя, который также предоставляет информацию о положении для замыкания контура положения.
Контроллеры движения – это микропроцессорные устройства со сложными алгоритмами, генерирующие сигналы с широтно-импульсной модуляцией (ШИМ). Силовые транзисторы сервопривода передают сигналы тока и напряжения для питания двигателя. Контроллер движения обычно обрабатывает информацию обратной связи от различных сервокомплексов. Контроллеры используют эту информацию для коммутации двигателя в соответствии с командами микропроцессора. По сути, интеллектуальные функции микропроцессора выполняют функции контроллера, в то время как электроника, связанная с силовыми устройствами, выполняет функции привода. По сути, контроллер – это элемент, который подаёт определённую команду в контур положения, скорости или тока, в то время как привод обеспечивает подачу напряжения и тока на двигатели в соответствии с требованиями контроллера.
")
Контроллер, как правило, представляет собой программируемое устройство, хранящее и выполняющее код, заданный программистом. Программирование осуществляется на различных языках, таких как BASIC, C+/C++, VB и языках, указанных в стандарте IEC 61131-3. Контроллеры оснащены многочисленными элементами безопасности для предотвращения перегрузок или остановки движения в случае отказа компонентов. Приводы же, в свою очередь, как правило, сосредоточены на получении входных команд контроллера и включении/выключении силовых транзисторов. Это создает ток и напряжение, необходимые для достижения заданного крутящего момента и скорости.
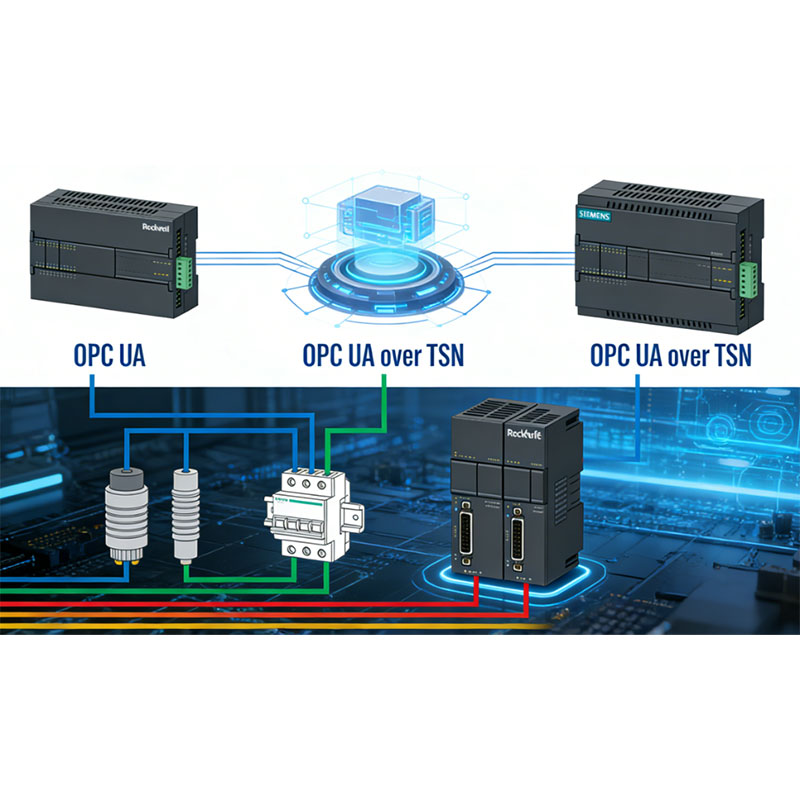
С развитием микропроцессоров и появлением новых коммутационных устройств контроллеры и приводы становятся всё более тесно переплетёнными, особенно в централизованных системах, где вся электроника размещена в одном шкафу управления. В децентрализованных решениях контроллер движения располагается в шкафу, а приводы — рядом с двигателями и взаимодействуют с централизованным контроллером движения через шину управления движением.
")