-


-


-



WhatsApp


Технологическая эволюция и границы применения промышленного машинного зрения
2026-03-17

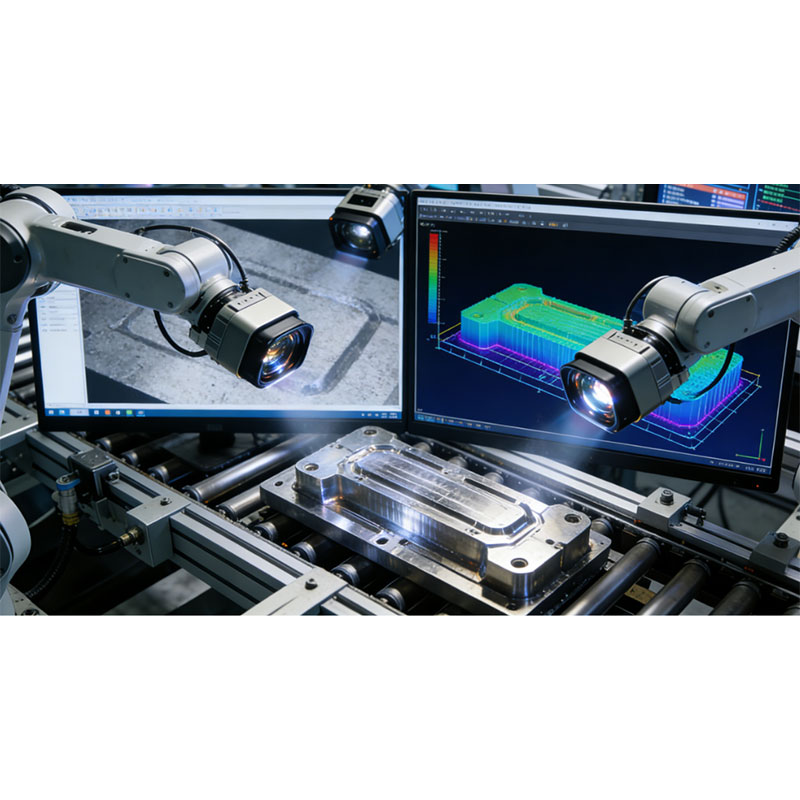
На автоматизированных производственных линиях системы машинного зрения играют все более важную роль. От обнаружения дефектов до измерения размеров, от позиционирования до идентификации и отслеживаемости — промышленные камеры выступают в роли «глаз» производственной линии, оказывая машинам поддержку в принятии решений.
Основные компоненты машинного зрения
В состав полноценной промышленной системы машинного зрения входят:
Источник света: недооцененный, но крайне важный элемент. Подходящий источник света (кольцевая подсветка, контровой свет, коаксиальный свет, структурированный свет) может выделить измеряемые характеристики, подавить помехи и напрямую повлиять на качество изображения и сложность алгоритма. Выбор цвета источника света (красный, синий, белый, инфракрасный) также должен определяться в зависимости от материала и цвета измеряемого объекта.
Объектив: определяет диапазон съемки и разрешение. Телецентрические объективы устраняют перспективные ошибки и подходят для высокоточных измерений; зум-объективы обеспечивают гибкость и подходят для переключения между несколькими рабочими местами.
Промышленные камеры: основные устройства получения изображений. CCD- и CMOS-сенсоры имеют свои преимущества и недостатки; первые обладают высокой чувствительностью и низким уровнем шума, а вторые — высокой частотой кадров и низким энергопотреблением. В зависимости от метода получения изображения их можно разделить на камеры с площадным сканированием и камеры с линейным сканированием. Первые подходят для статической или низкоскоростной съемки, а вторые — для высокоскоростной съемки непрерывно движущихся объектов.
Плата захвата изображений : передает данные с камеры в блок обработки в режиме реального времени. В высокоскоростных приложениях пропускная способность и стабильность платы захвата имеют решающее значение.
Визуальные алгоритмы : Традиционные алгоритмы основаны на вручную разработанных признаках (обнаружение границ, анализ областей, сопоставление шаблонов); алгоритмы глубокого обучения, напротив, автоматически извлекают признаки с помощью нейронных сетей и хорошо работают в сложных условиях и с разнообразными дефектами.
Типичные сценарии применения
Обнаружение дефектов: царапины на электронных компонентах, загрязнения на печатных платах, трещины на металлических поверхностях — системы машинного зрения могут идентифицировать эти дефекты за миллисекунды, отбраковывая бракованную продукцию. Обнаружение микротрещин в фотоэлектрических элементах — типичная сложная задача, требующая камеры высокого разрешения и источника света определенной длины волны.
Измерение размеров: В области автомобильных деталей и прецизионной обработки системы машинного зрения позволяют проводить измерения с точностью до микрона и предоставлять обратную связь в реальном времени о погрешностях обработки. Технология многокамерной сшивки позволяет измерять крупные заготовки, такие как кузова автомобилей.
Позиционирование и наведение : Когда робот захватывает заготовку в неупорядоченном состоянии, ему необходима система машинного зрения, которая предоставляет трехмерные координаты и информацию о положении. Калибровка «рука-глаз» является ключевым этапом для достижения точного наведения, устанавливая соотношение преобразования между системой координат камеры и системой координат робота.
Идентификация и отслеживаемость : Считыватель штрихкодов идентифицирует штрихкоды, QR-коды и DPM-коды (прямые идентификаторы деталей) и вводит информацию о продукте в систему MES для обеспечения полной отслеживаемости на протяжении всего жизненного цикла.
Взаимодополняемость 2D и 3D зрения
2D-зрения является зрелой и относительно недорогой, что делает её подходящей для таких сценариев, как обнаружение плоскостей и распознавание символов. Однако 2D-изображениям не хватает информации о глубине, они чувствительны к изменениям освещения и с трудом обрабатывают отражающие или тёмные объекты.
Трехмерное зрение получает информацию о глубине с помощью таких технологий, как лазерная триангуляция, структурированный свет и бинокулярное стереоскопическое зрение, что позволяет обнаруживать трехмерные особенности, такие как перепады высот, плоскостность и объем. В сценариях, связанных с неупорядоченным захватом, отслеживанием сварного шва и контролем пути клея, трехмерное зрение незаменимо.
Революция, вызванная глубоким обучением.
Ограничения традиционных алгоритмов компьютерного зрения заключаются в их чувствительности к изменениям морфологии дефектов, необходимости ручной настройки параметров и сложности обработки сложного фона. Внедрение глубокого обучения (особенно сверточных нейронных сетей CNN) дало системам компьютерного зрения возможность «обучения по аналогии».
Обучение можно проводить с небольшим количеством образцов, адаптируясь к разнообразию дефектов.
Обладает высокой помехоустойчивостью и нечувствителен к изменениям освещения или положения.
Она способна одновременно обнаруживать несколько типов дефектов.
В коммерческое программное обеспечение, такое как Halcon и VisionPro, интегрированы инструменты глубокого обучения, а библиотеки с открытым исходным кодом, такие как OpenCV, также обеспечивают широкую поддержку алгоритмов.
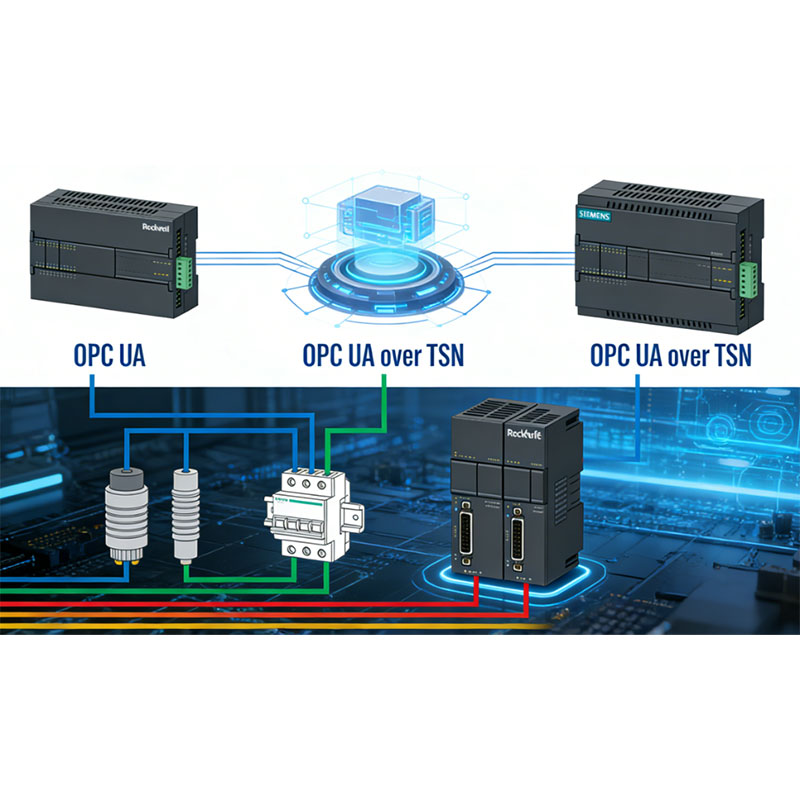
Тенденции будущего: периферийное зрение и интеллектуальные системы на стороне конечного пользователя.
Благодаря повышению вычислительной мощности микросхем, алгоритмы обработки изображений переходят из промышленных управляющих компьютеров в интеллектуальные камеры и периферийные вычислительные блоки. Периферийная обработка снижает требования к пропускной способности передачи изображений, повышает производительность в реальном времени, а также снижает системные издержки. Сочетание TSN (Time-Sensitive Networking) и систем машинного зрения позволяет достичь точной синхронизации нескольких камер, удовлетворяя потребности в контроле высокоскоростных производственных линий.